Articles
The word clouds (formed in Tagxedo,
online) serve as a visual "abstract" of
the adjacent article!
Sandra
L.
Arlinghaus
Introduction
Steiner's
problem is that of finding
a shortest path joining
an arbitrary
number of points.
The solution is a
graph-theoretic tree
of minimum length, a
'Steiner tree', and it
may include
points not given in
the original
set. It is
precisely this
latter possibility
that distinguishes
Steiner's problem
from others,
such as the
travelling salesman
problem,
although both
of these, and
other network
optimization
problems, are
NP-complete.
Any new point,
chosen to
reduce total
network length
joining the
original
set of points
(a 'Steiner
point'), may
be chosen from
an an infinite
set of positions.
The challenge
is
to
determine how
to find these
intervening
positions.
Here,
the power of
animation is
employed to advantage
to offer the
reader visual
guidance in
the spatial
process of
finding
Steiner trees.
Example
is
chosen
from previous
work done by
the author
(Arlinghaus,
1977; Arlinghaus,
1989).
In these earlier
documents,
images are
only static
and they
quickly become
visually complex;
so too,
associated
proofs of
theorems
become
notationally
complex.
Animation
unravels that
complexity.
The
Case of
Three Given
Points
In the case of three
given points, V1, V2,
and V3, form a
triangle from the points
(Figure 1). The Steiner
Tree will either follow along
two sides of the triangle
itself, as a 'degenerate'
tree, or an extra point will
produce a new network shorter
than following the two
shortest sides. There is
no unique construction for
finding the extra Steiner
point; a number of them
exist. The one presented
here is due to Hoffman (Figure
1) and is chosen because it is
the one that appeared to
generalized geometrically in a
somewhat straightforward
manner (Coxeter, p. 21).
The animation in Figure 1 opens with
the set of three points
displayed. The next
frame forms a triangle on
these three points. The
third frame identifies side V1V2
of the triangle by coloring it
magenta. A subsequent
sequence of faster moving
frames rotates the magenta
side, through 10 degree
increments, to a final
position rotated through V1
60 degrees from V1V2
to V1V2'.
The next frame inserts the
circle that circumscribes the
triangle V1V2V2'; that
circle is presented in cyan at
25% opacity. Following
that, the line V2'V3
is drawn, in cyan. The
point S, the Steiner
point, is introduced in the
next frame as the intersection
of the circumcircle and the
line V2'V3. From
there, S is joined,
using lighter weight red
lines, to each of V1,
V2, V3 to
produce the Steiner tree
within the triangle. The
central angles at S
are all 120 degrees. Finally,
the triangle is removed to
reveal only the Steiner tree
on these three points.
Then, the scene dissolves back
to the starting
arrangement. The proofs,
explaining why this
construction works, and when
it is necessary, are available
in a variety of references
(Coxeter, 1961;
Cockayne, 1967; Melzak, 1961;
Gilbert and Pollak, 1968;
Werner, 1968 and 1969).
The ones that most closely
match the visual display in
this section and subsequent
sections are in works by the
author (Arlinghaus, 1977 and
1989).
 Figure
1 .
Figure
1 .
|
Two
Higher
Order Steiner
Trees
In
this section,
the general
labeling
and coloring
scheme
in the figures
is that
suggested by
the case of
three given
points:
magenta lines
are derived by
rotation
through 60
degrees and
cyan circles
are
circumcircles
associated
with that
rotation.
Lines
are
used to
intersect cyan
circles
to determine
Steiner point
positions.
Finally,
Steiner points
are joined
to each other
and to given
points at
angles of 120
degrees, using
lighter
weight red
lines,
to produce a
Steiner
tree.
Subtle
variations, in
label
position,
density of
opacity, and
so forth are
used as
emphasis
without
clutter.
The
Case
of Four
Given Points
A non-degenerate
Steiner tree on four given
points has two new Steiner
points, S1 and S2,
introduced. Figure 2
illustrates the manner of
construction for this sort of
tree.
Figure
2.
|
The
Case
of Six
Given Points
A
non-degenerate Steiner
tree on six points has
four new points
introduced. In
Figure 3, the construction
involves reduction to a
previous case:
reduction of the hexagon
to the triangle. The
circumcircle with 10%
fill, rather than 25%
fill, aids in this
reduction.
Figure 3.
|
A
Closer Look at
the
Six Point Case
The construction
show in Figure 3 is for a
hypothetical distribution of
six points, designed to
illustrate process. In
the real world, the spacing
among six points, chosen for
geographical or other
reasons, might not produce
such a display. Now,
consider a set of six
locations at the edge of
Lake Michigan and reflect on
various ways that they might
be joined--shipping route
constraints, weather-related
issues, or supply and demand
needs at various ports.
Figure 4 illustrates the
patterns of linkage, each a
Steiner tree of prescribed
connection pattern, that
might emerge (Arlinghaus,
1977).
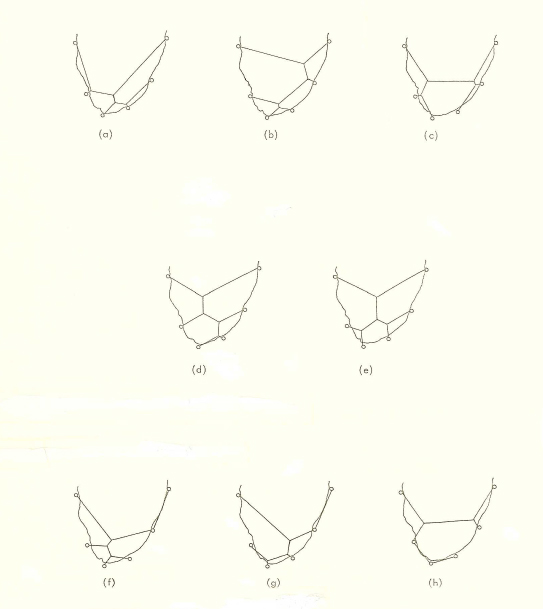
Figure 4. Arlinghaus,
1977.
|
The sequence of
figures below shows an
animation for each of these
eight figures, with figure
number to correspond to the
labeling in Figure 4.
In these, vertex labels are
by now assumed to be
familiar and are left off to
expose the construction more
clearly. Some networks
are full, requiring the full
complement of new points,
while others are partially
degenerate. Variation
in the animation is designed
to focus emphasis.
Figure 4a.
|
Figure 4b.
|
Figure 4c.
|
Figure 4d.
|
Figure 4e.
|
Figure 4f.
|
Figure 4g.
|
Figure 4h.
|
Geometric
views that become complex
can be improved, in terms of
comprehension, with
animation. Older texts
can be made to come alive;
more recent ones can be
brightened (eBook materials
associated with Arlinghaus
and Kerski, 2013); most
important, animation can do
more than enhance existing
research--as it opens better
or new vistas, it can guide
it!
References
Arlinghaus, Sandra
L. 1977. On
Geographical Network Location
Theory. Ph.D.
Dissertation, Department of
Geography, The University of
Michigan.
Arlinghaus, Sandra
L. 1989. An
Atlas of Steiner Networks.
Monograph
9. Ann Arbor:
Institute of Mathematical
Geography.
Arlinghaus, Sandra L. and
Kerski, Joseph.
2013. Spatial
Mathematics: Theory
and Practice through
Mapping. Boca
Raton: CRC Press.
Coxeter, H. S. M.
1961. Introduction
to Geometry. New
York: John Wiley &
Sons.
Cockayne,
1967. On the Steiner
problem, Canadian
Mathematical Bulletin,
10, 431-450.
Melzak, Z. A.
1961. On the
problem of Steiner, Canadian
Mathematical
Bulletin, 4,
143-148.
Gilbert, E. N. and
Pollak, H. O.
1968. Steiner
minimal trees,
SIAM Journal of
Applied
Mathematics,
16,
1-29.
Werner, C.
1968. The role
of topology and
geometry in optimal
network design, Papers
of the Regional
Science
Association.
Werner, C.
1969. Networks
of minimum length, The
Canadian
Geographer,
XIII, 1, 47-69.
|
In the In
|
|